
无人驾驶-05-自动驾驶端到端技术的现状与分类
说起端到端,每个从业者可能都觉得会是下一代自动驾驶量产方案绕不开的点!特斯拉率先吹响了方案更新的号角,无论是完全端到端,还是专注于planner的模型,各家公司基本都投入较大人力去研发,小鹏、蔚来、理想、华为都对外展示了其端到端自动驾驶方案,效果着实不错,非常有研究价值。
为什么需要端到端
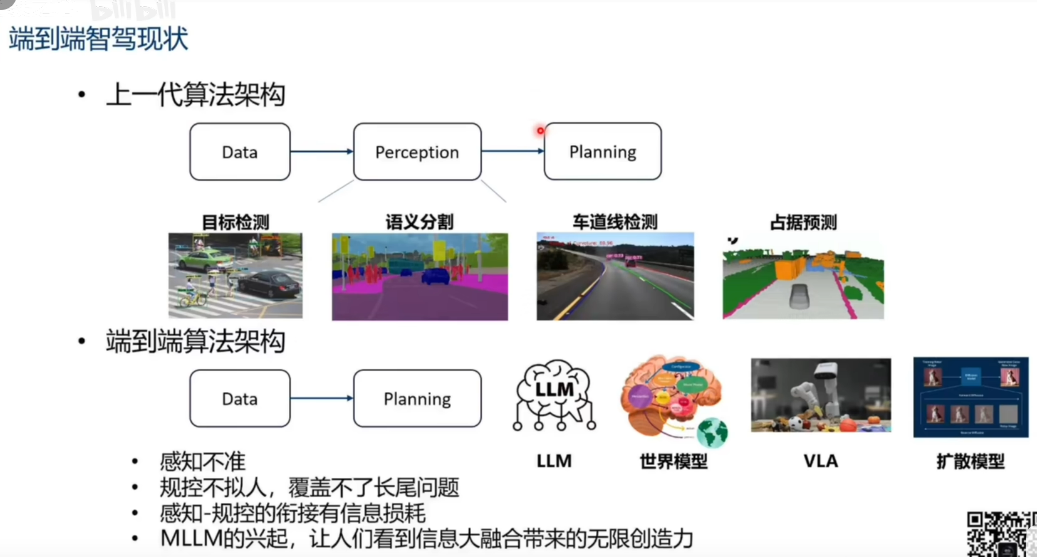
首先我们聊一下当前的主流自动驾驶方案,主要核心部分包括:感知模块、预测模块、规控模块。每个模块相对独立,感知模块给预测模块提供动静态障碍物信息;预测模块为规控模块提供规划的参考,规划再转换为控制指令。从传感器端到控制端,需要多个功能支持,这就不可避免导致了累积误差,一旦碰到问题,需要整个pipeline做分析。而且每个模块的优化,并不能保证整个系统达成最优解。
这个时候,就希望有一种模型能够完成感知信息的无损传递,即从传感器端到输出控制策略端,这也是端到端自动驾驶提出的原因。传统定义上感知和规划模块的对接一般是通过白名单(比如机动车、行人、甚至occ输出的非通用几何障碍物)的检测与预测来完成,是人为定义的规则和抽象。随着产品的迭代,每一次都需要添加各类case,设计各种博弈的策略,从模型训练到工程部署再到逻辑设计,时间和人力成本高昂。
而且这种方式无法罗列所有情况,那么是否可以通过对整个场景的学习抽象,无损的将所有信息传递给PnC部分?这就是我们期望的端到端。端到端核心是优化最终目标且全局可导,作为一个完整的优化任务来看,直接求最优解,而不是先求感知再求规控的最优解。
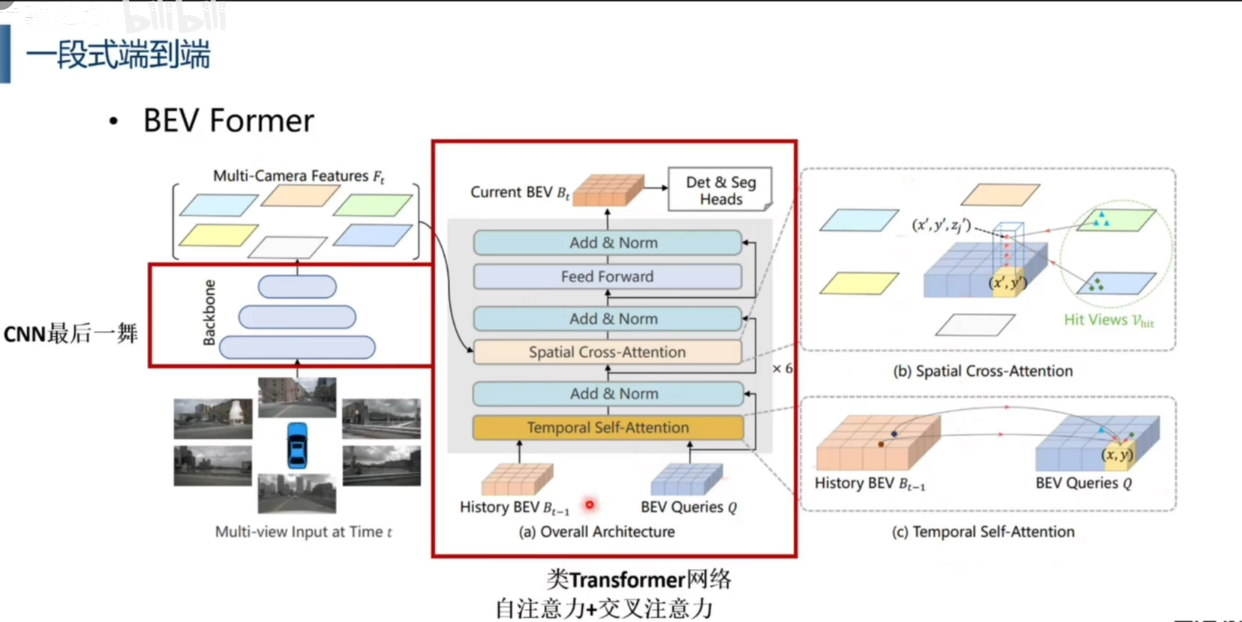
一、算法架构
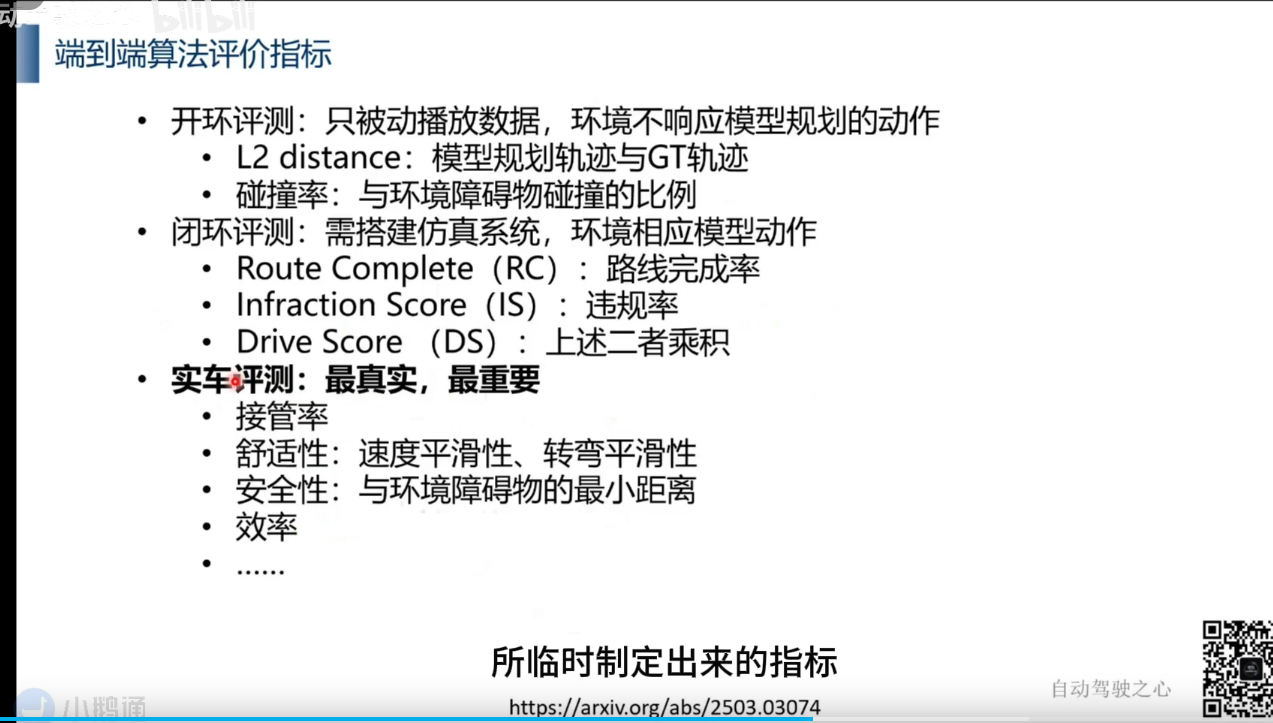
二、端到端算法
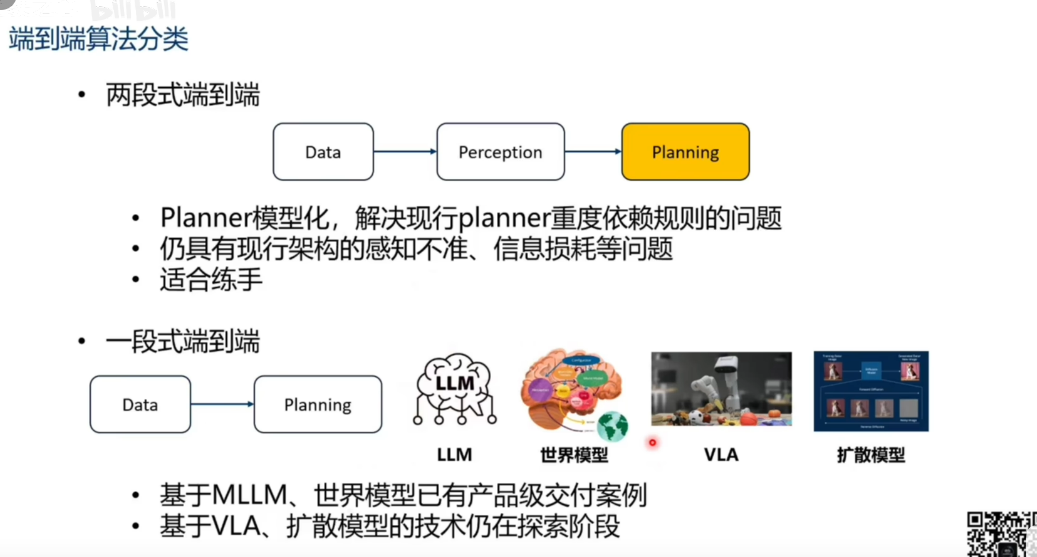
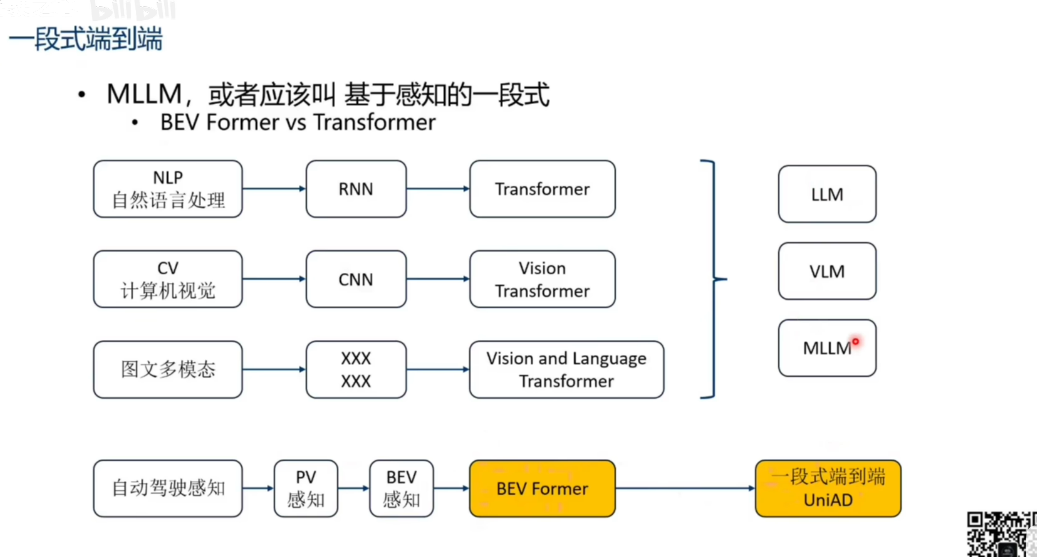
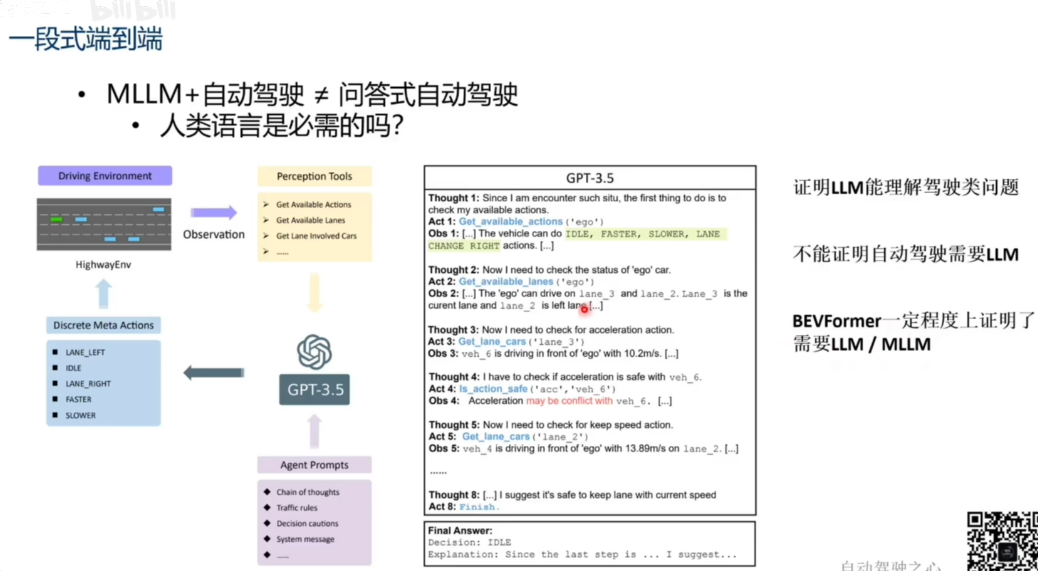
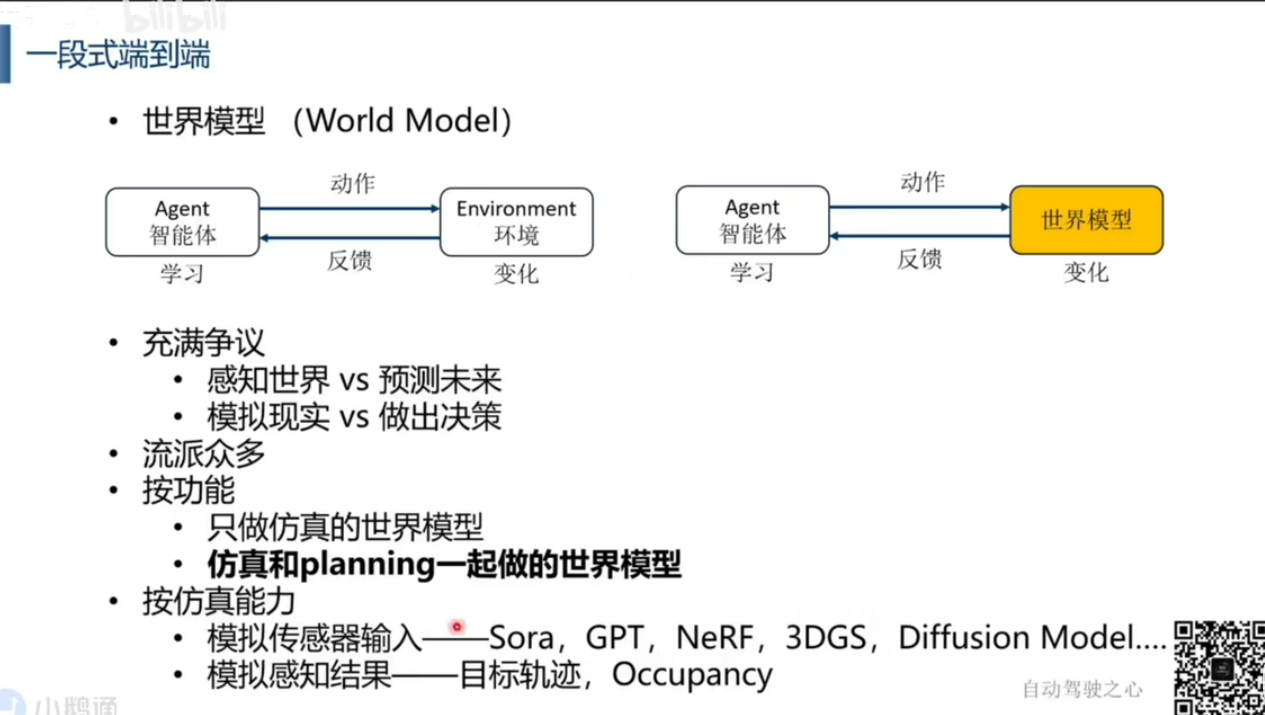
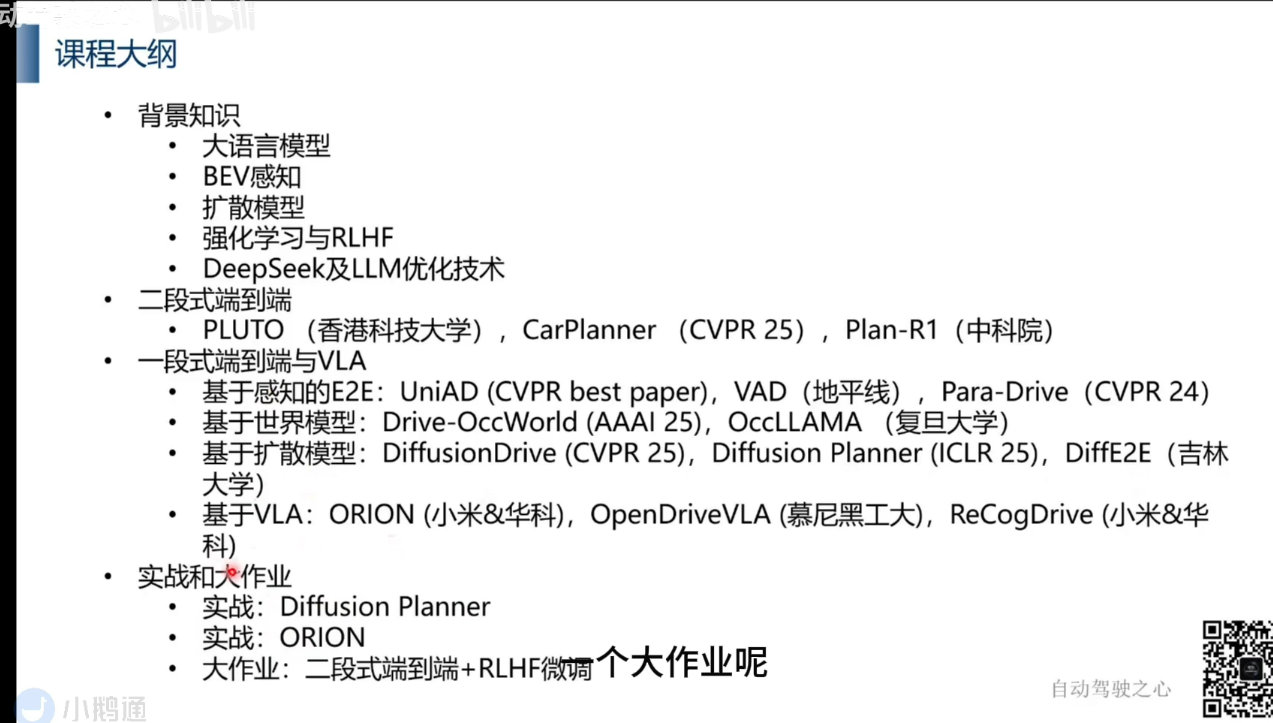
三、一段式端到端有哪些流派
1、世界模型
2、VLA
传统机器人: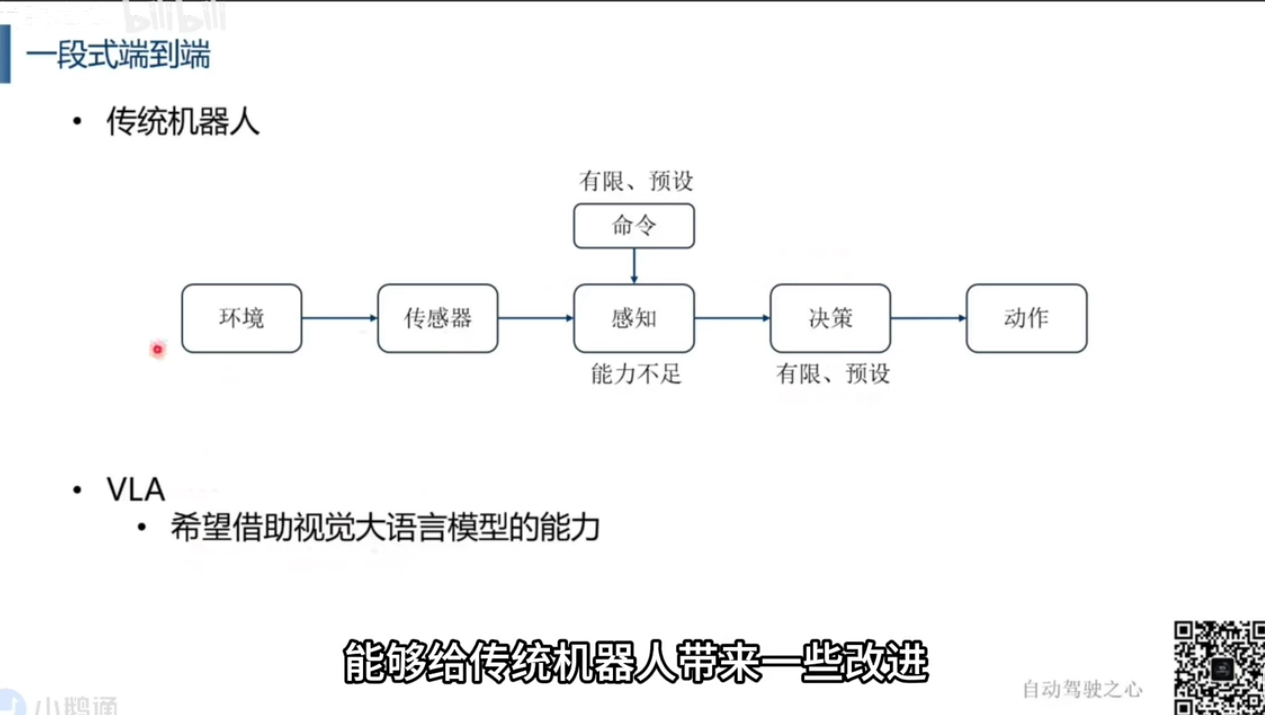
VLA机器人(大预言模型机器人):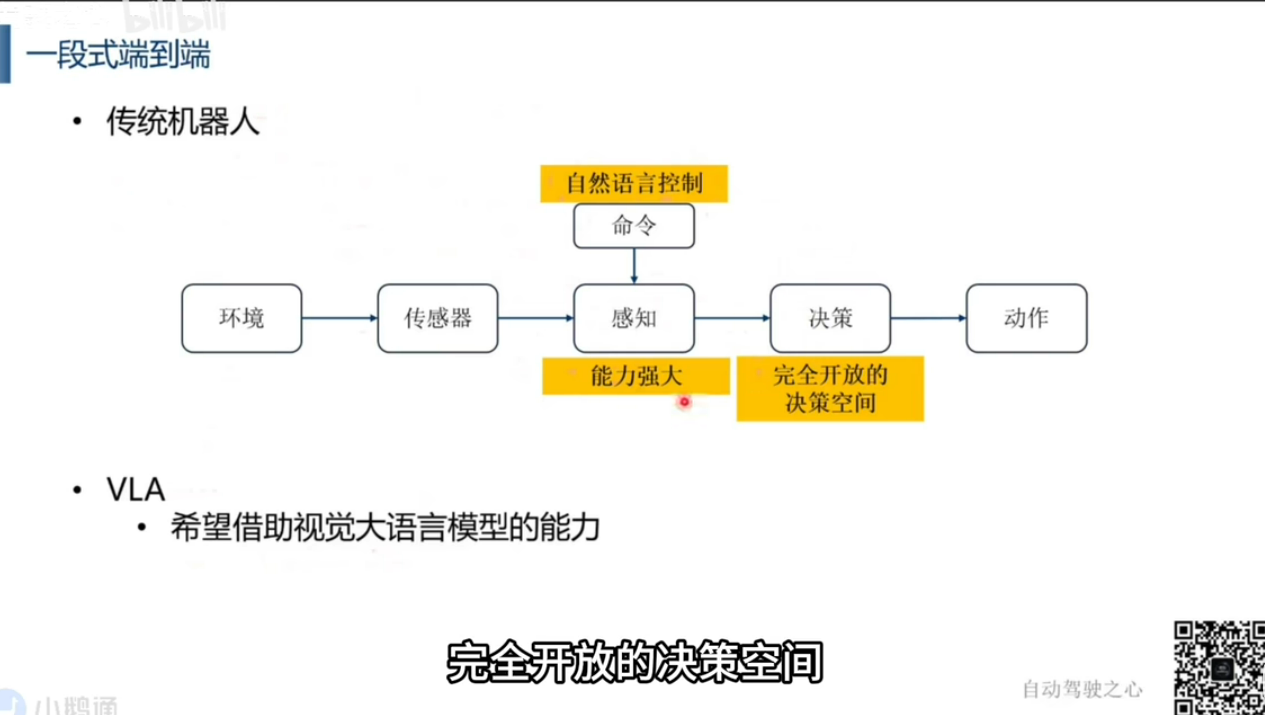
VLM(视觉大预言模型原理)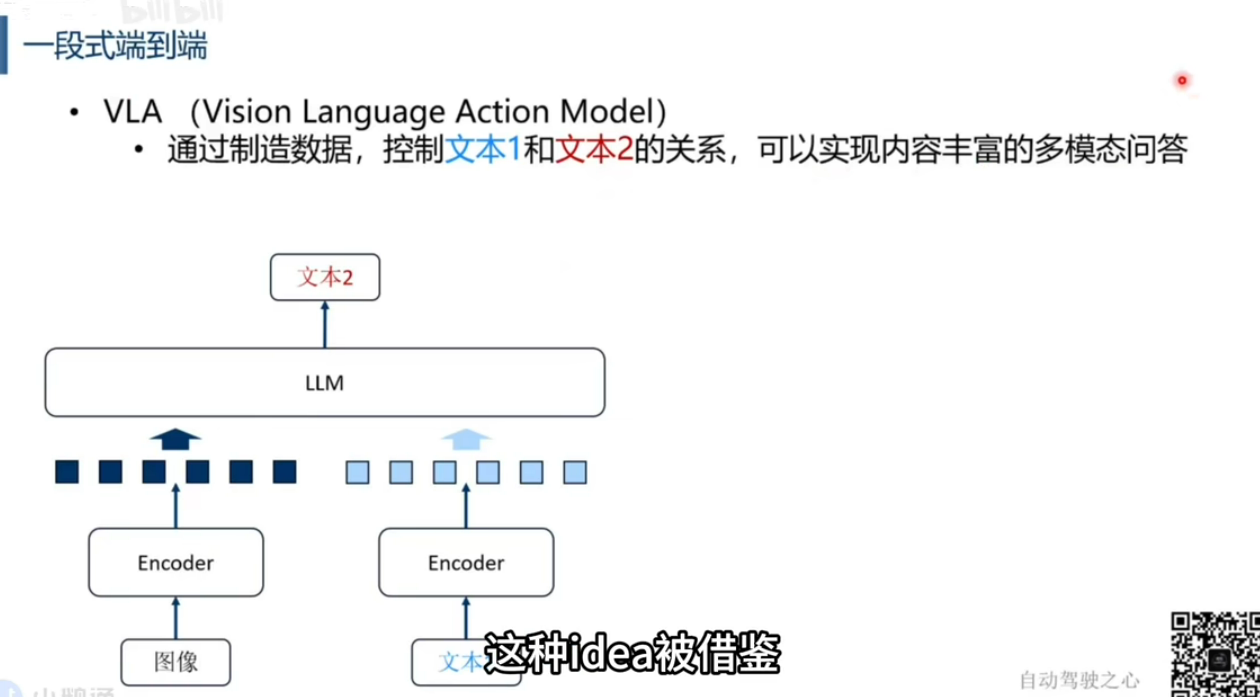
VLA借鉴 VLM 这种方式,被应用到机器人领域: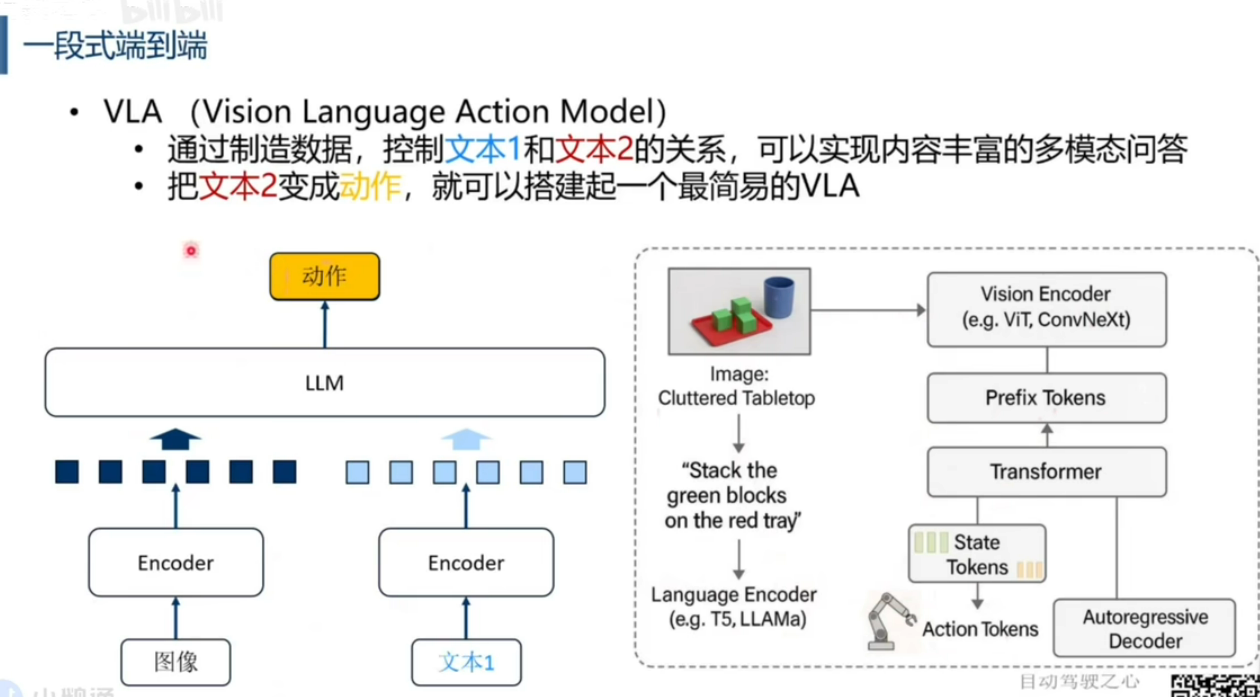
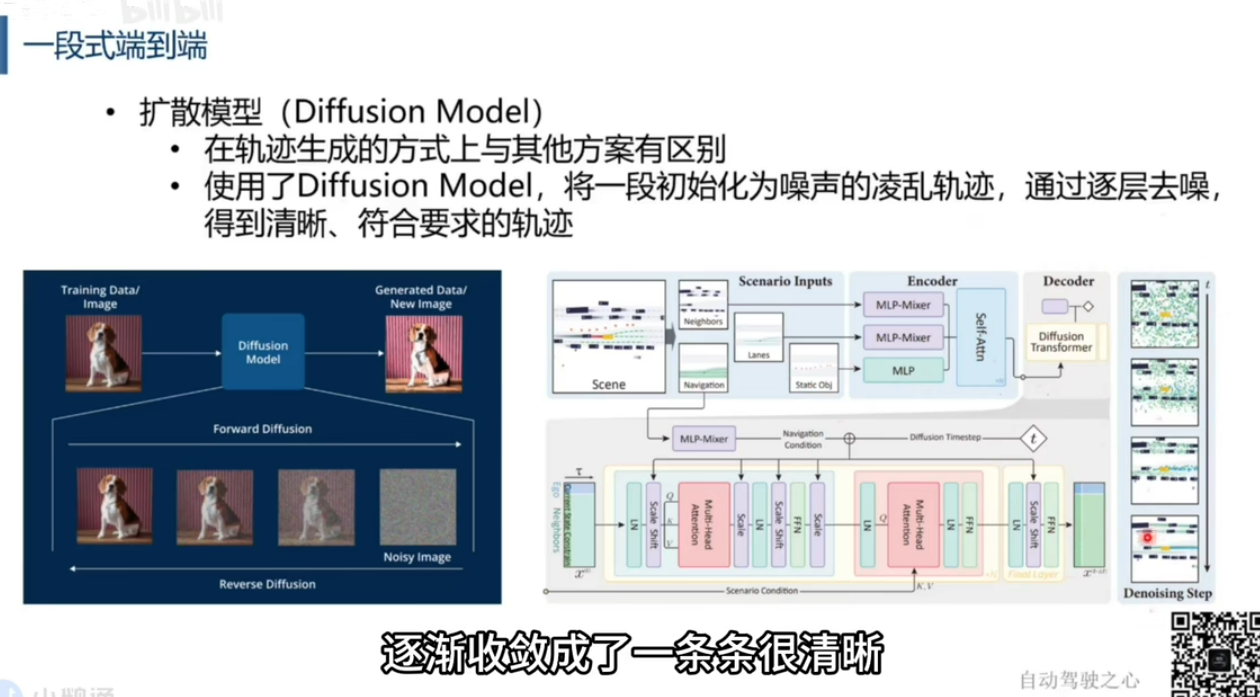
3、扩散模型
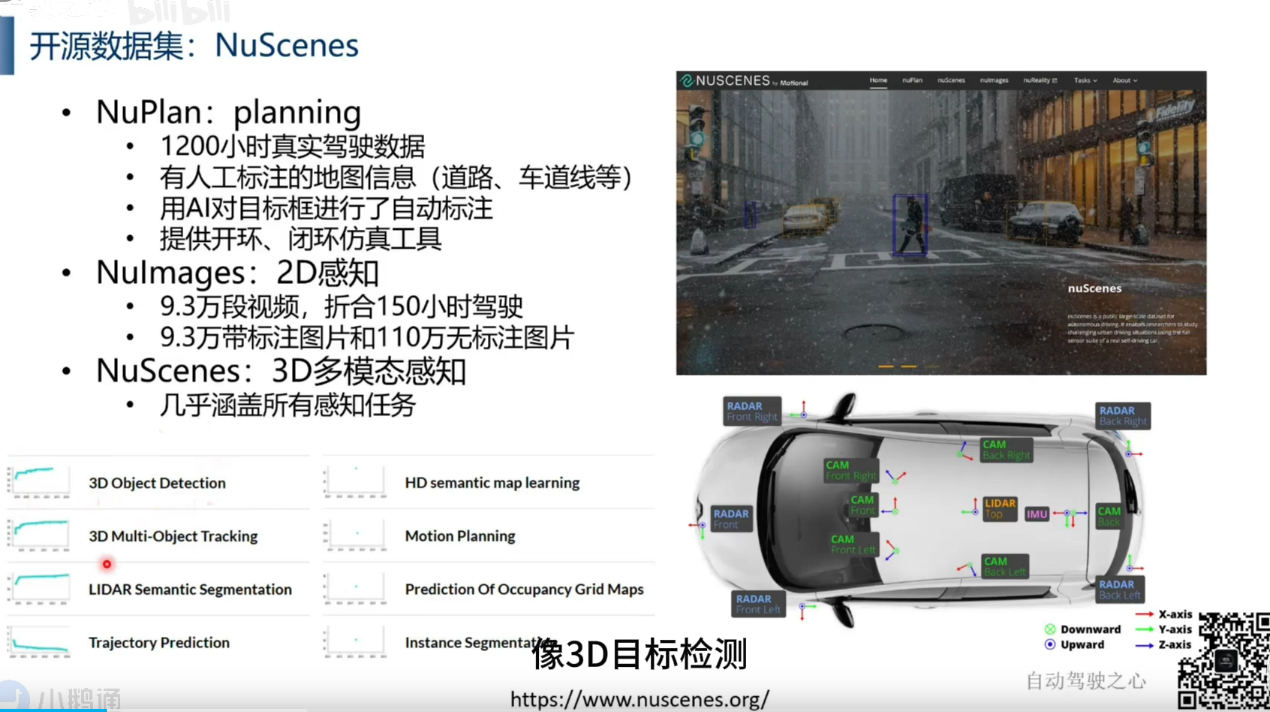
四、开源数据集
相关文章:
B站自动驾驶|端到端到VLA
为者常成,行者常至
自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)


