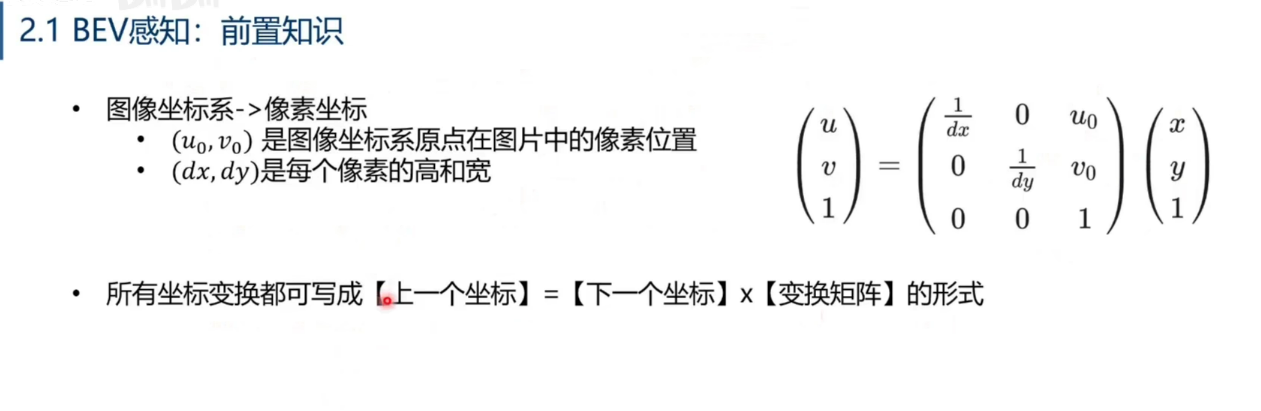
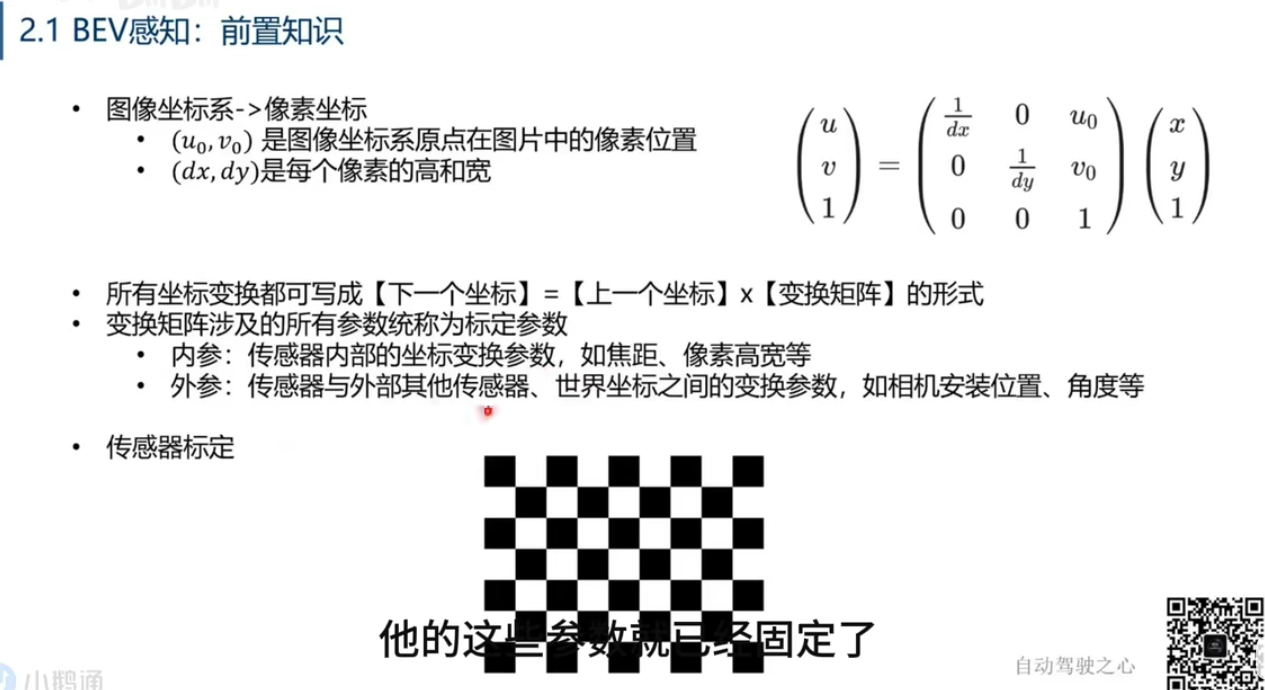
图像坐标系 -> 像素坐标
为者常成,行者常至
版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)
`单行代码`
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
请使用微信扫描二维码。 如何开启打赏?