
AI For Trading: Recurrent Neural Networks (RNN)(96)
前面我们已经学习了CNN(卷积神经网络),今天来学习RNN(递归神经网络)。
Recurrent Neural Networks
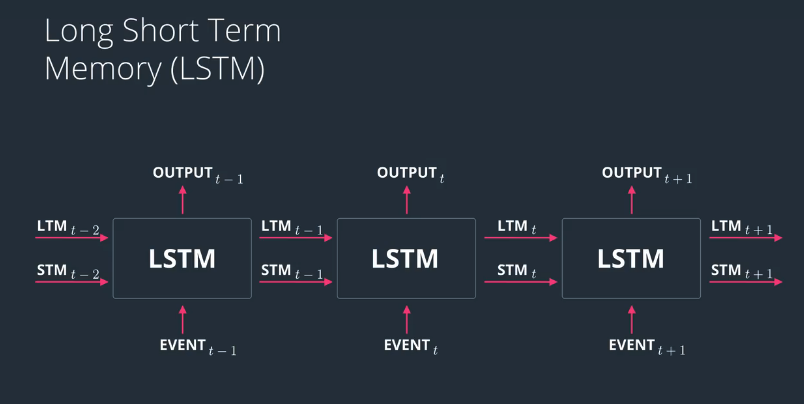
Now that you have some experience with PyTorch and deep learning, I'll be teaching you about recurrent neural networks (RNNs) and long short-term memory (LSTM) . RNNs are designed specifically to learn from sequences of data by passing the hidden state from one step in the sequence to the next step in the sequence, combined with the input. LSTMs are an improvement the RNNs, and are quite useful when our neural network needs to switch between remembering recent things, and things from long time ago. But first, I want to give you some great references to study this further. There are many posts out there about LSTMs, here are a few of my favorites:
Chris Olah's LSTM post
Edwin Chen's LSTM post
Andrej Karpathy's blog post on RNNs
Andrej Karpathy's lectureon RNNs and LSTMs from CS231n
RNN vs LSTM
假设我们有一个普通神经网络,能够识别图像,我们输入了这张图,如下: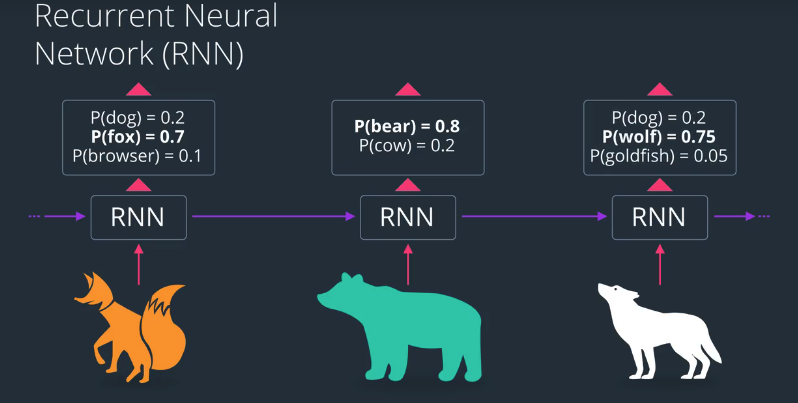
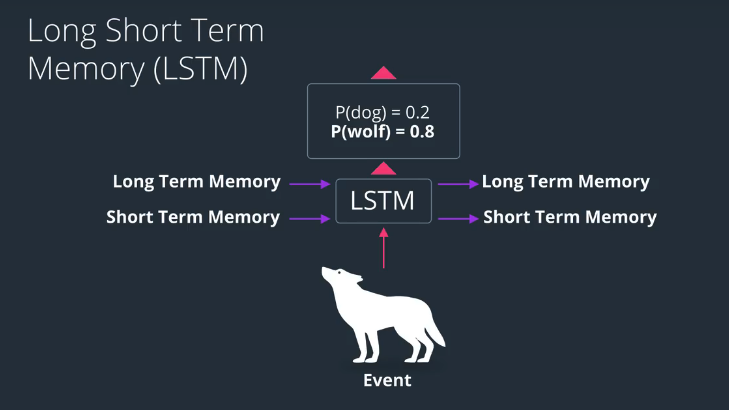
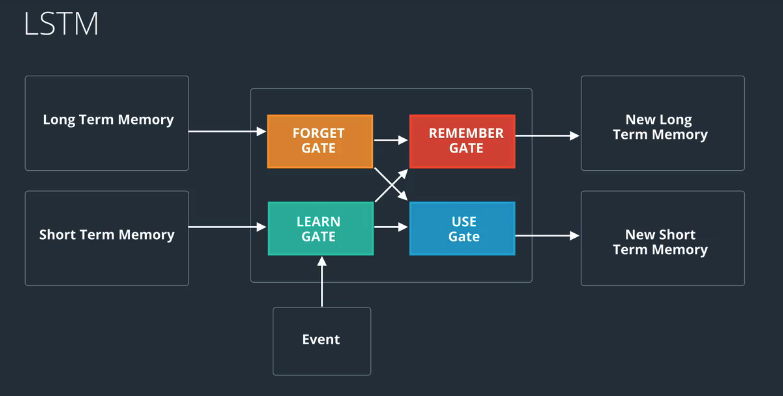
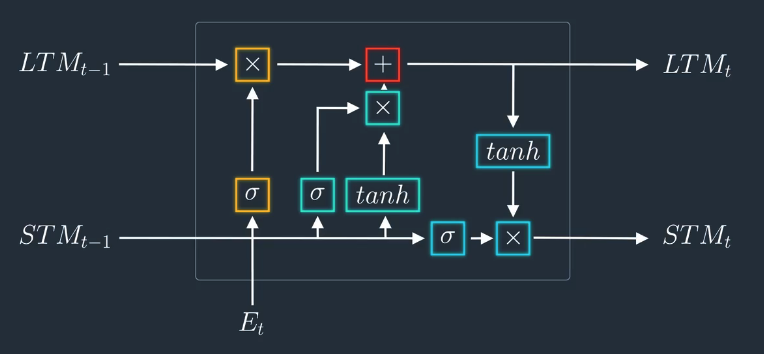
Basic of LSTM
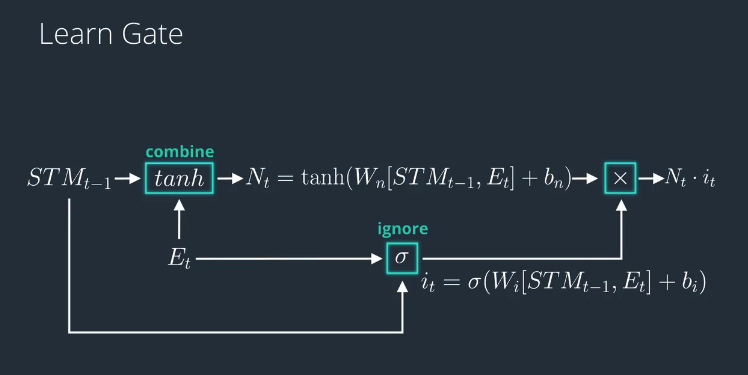
The Learn Gate
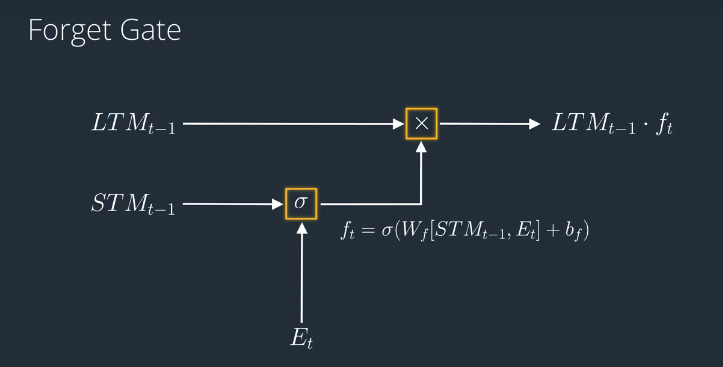
The Forget Gate
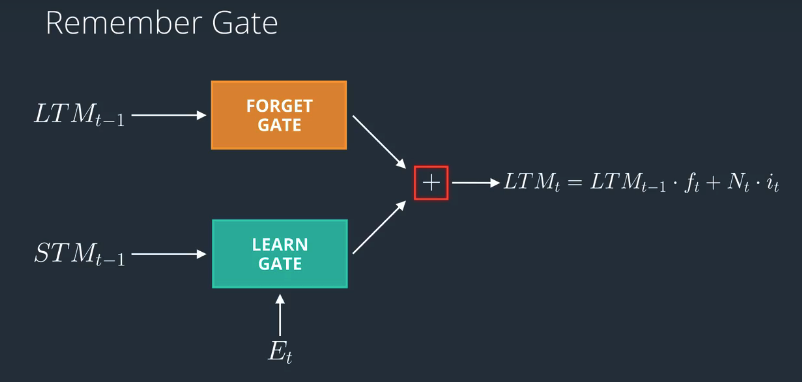
The Remember Gate
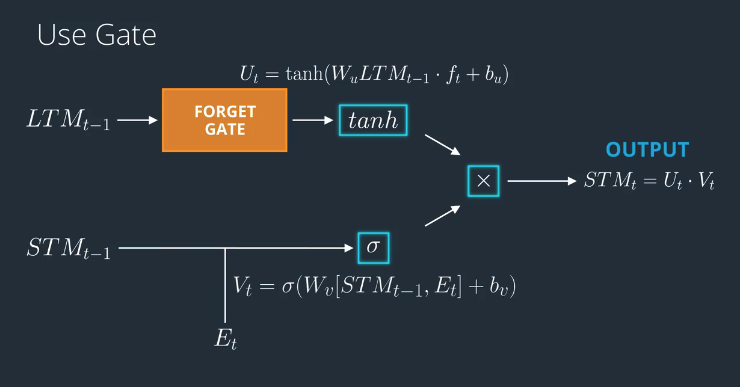
The Use Gate
Putting it All Together
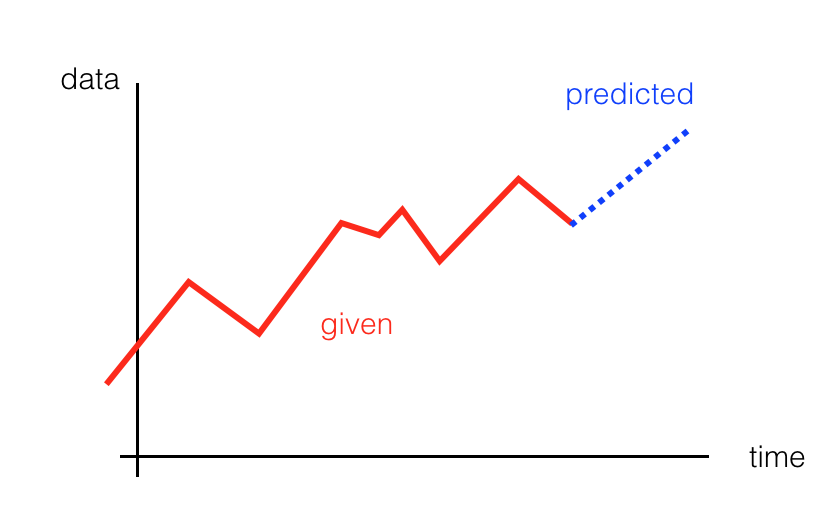
Simple RNN
In ths notebook, we're going to train a simple RNN to do time-series prediction. Given some set of input data, it should be able to generate a prediction for the next time step!
- First, we'll create our data
- Then, define an RNN in PyTorch
- Finally, we'll train our network and see how it performs
Import resources and create data
import torch
from torch import nn
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inlineplt.figure(figsize=(8,5))
# how many time steps/data pts are in one batch of data
seq_length = 20
# generate evenly spaced data pts
time_steps = np.linspace(0, np.pi, seq_length + 1)
data = np.sin(time_steps)
data.resize((seq_length + 1, 1)) # size becomes (seq_length+1, 1), adds an input_size dimension
x = data[:-1] # all but the last piece of data
y = data[1:] # all but the first
# display the data
plt.plot(time_steps[1:], x, 'r.', label='input, x') # x
plt.plot(time_steps[1:], y, 'b.', label='target, y') # y
plt.legend(loc='best')
plt.show()Define the RNN
Next, we define an RNN in PyTorch. We'll use nn.RNN to create an RNN layer, then we'll add a last, fully-connected layer to get the output size that we want. An RNN takes in a number of parameters:
- input_size - the size of the input
- hidden_dim - the number of features in the RNN output and in the hidden state
- n_layers - the number of layers that make up the RNN, typically 1-3; greater than 1 means that you'll create a stacked RNN
- batch_first - whether or not the input/output of the RNN will have the batch_size as the first dimension (batch_size, seq_length, hidden_dim)
Take a look at the RNN documentation to read more about recurrent layers.
class RNN(nn.Module):
def __init__(self, input_size, output_size, hidden_dim, n_layers):
super(RNN, self).__init__()
self.hidden_dim=hidden_dim
# define an RNN with specified parameters
# batch_first means that the first dim of the input and output will be the batch_size
self.rnn = nn.RNN(input_size, hidden_dim, n_layers, batch_first=True)
# last, fully-connected layer
self.fc = nn.Linear(hidden_dim, output_size)
def forward(self, x, hidden):
# x (batch_size, seq_length, input_size)
# hidden (n_layers, batch_size, hidden_dim)
# r_out (batch_size, time_step, hidden_size)
batch_size = x.size(0)
# get RNN outputs
r_out, hidden = self.rnn(x, hidden)
# shape output to be (batch_size*seq_length, hidden_dim)
r_out = r_out.view(-1, self.hidden_dim)
# get final output
output = self.fc(r_out)
return output, hidden
Check the input and output dimensions
As a check that your model is working as expected, test out how it responds to input data.
# test that dimensions are as expected
test_rnn = RNN(input_size=1, output_size=1, hidden_dim=10, n_layers=2)
# generate evenly spaced, test data pts
time_steps = np.linspace(0, np.pi, seq_length)
data = np.sin(time_steps)
data.resize((seq_length, 1))
test_input = torch.Tensor(data).unsqueeze(0) # give it a batch_size of 1 as first dimension
print('Input size: ', test_input.size())
# test out rnn sizes
test_out, test_h = test_rnn(test_input, None)
print('Output size: ', test_out.size())
print('Hidden state size: ', test_h.size())Training the RNN
Next, we'll instantiate an RNN with some specified hyperparameters. Then train it over a series of steps, and see how it performs.
# decide on hyperparameters
input_size=1
output_size=1
hidden_dim=32
n_layers=1
# instantiate an RNN
rnn = RNN(input_size, output_size, hidden_dim, n_layers)
print(rnn)Loss and Optimization
This is a regression problem: can we train an RNN to accurately predict the next data point, given a current data point?
- The data points are coordinate values, so to compare a predicted and ground_truth point, we'll use a regression loss: the mean squared error.
- It's typical to use an Adam optimizer for recurrent models.
# MSE loss and Adam optimizer with a learning rate of 0.01
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(rnn.parameters(), lr=0.01) Defining the training function
This function takes in an rnn, a number of steps to train for, and returns a trained rnn. This function is also responsible for displaying the loss and the predictions, every so often.
Hidden State
Pay close attention to the hidden state, here:
- Before looping over a batch of training data, the hidden state is initialized
- After a new hidden state is generated by the rnn, we get the latest hidden state, and use that as input to the rnn for the following steps
# train the RNN
def train(rnn, n_steps, print_every):
# initialize the hidden state
hidden = None
for batch_i, step in enumerate(range(n_steps)):
# defining the training data
time_steps = np.linspace(step * np.pi, (step+1)*np.pi, seq_length + 1)
data = np.sin(time_steps)
data.resize((seq_length + 1, 1)) # input_size=1
x = data[:-1]
y = data[1:]
# convert data into Tensors
x_tensor = torch.Tensor(x).unsqueeze(0) # unsqueeze gives a 1, batch_size dimension
y_tensor = torch.Tensor(y)
# outputs from the rnn
prediction, hidden = rnn(x_tensor, hidden)
## Representing Memory ##
# make a new variable for hidden and detach the hidden state from its history
# this way, we don't backpropagate through the entire history
hidden = hidden.data
# calculate the loss
loss = criterion(prediction, y_tensor)
# zero gradients
optimizer.zero_grad()
# perform backprop and update weights
loss.backward()
optimizer.step()
# display loss and predictions
if batch_i%print_every == 0:
print('Loss: ', loss.item())
plt.plot(time_steps[1:], x, 'r.') # input
plt.plot(time_steps[1:], prediction.data.numpy().flatten(), 'b.') # predictions
plt.show()
return rnn
# train the rnn and monitor results
n_steps = 75
print_every = 15
trained_rnn = train(rnn, n_steps, print_every)Time-Series Prediction
Time-series prediction can be applied to many tasks. Think about weather forecasting or predicting the ebb and flow of stock market prices. You can even try to generate predictions much further in the future than just one time step!
为者常成,行者常至
自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)


