
无人驾驶-09-从原始传感器数据到控制策略
一、完全端到端方法上半部分
1. 从原始传感器数据到控制策略
1)传统自动驾驶基本流程
- 模块化串联结构:采用感知→预测→规划→控制的串联部署方式,将复杂任务分解为更小的子任务
- 信息传递方式:下游模块接收上游模块的输出结果,存在模块间误差传导问题
- 规则驱动特性:基于规则的系统难以解决自动驾驶中的长尾问题
2)端到端自动驾驶基本流程 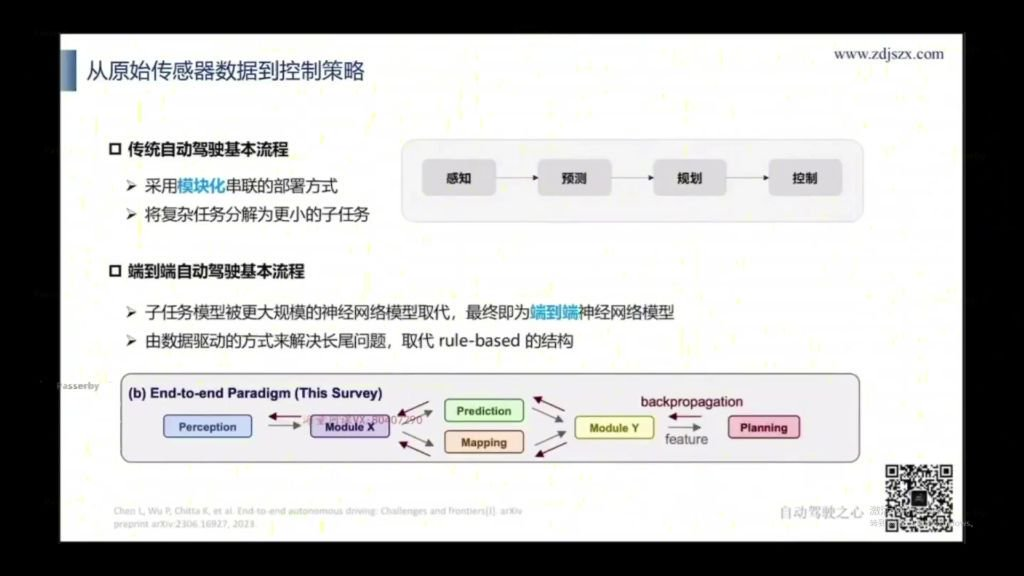
- 统一模型结构:用大规模神经网络取代传统模块化结构,子任务间通过特征进行信息传递
- 数据驱动优势:模型自主学习车辆控制所需特征,避免传统流程中的信息损失
- 特征传递机制:各模块间不再依赖中间结果,而是通过特征实现无损信息传递
3)端到端方法优势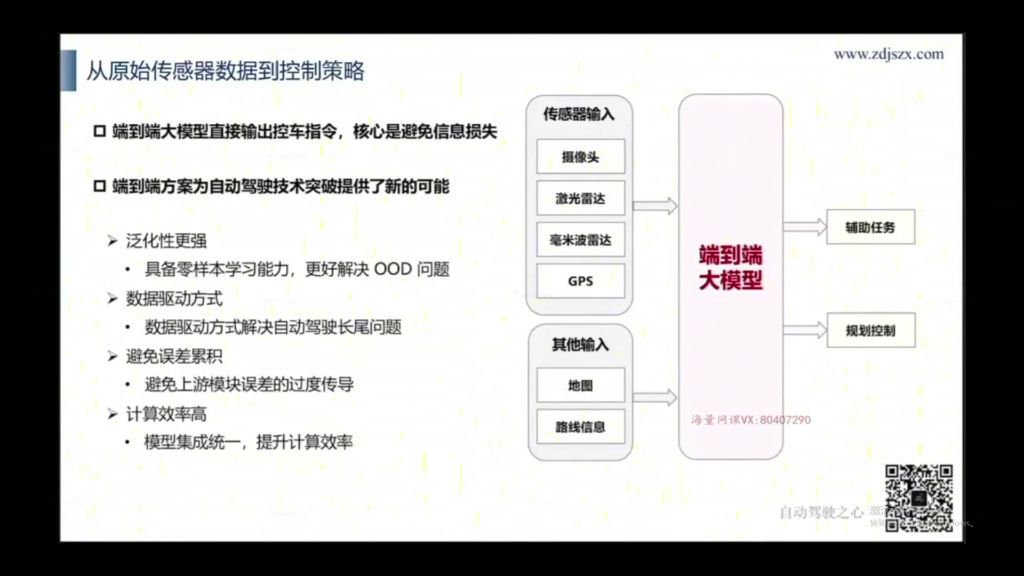
- OOD问题处理:具备两阶段学习能力,能更好处理分布外(OOD)问题
- 长尾问题解决:数据驱动方式有效应对传统规则系统难以覆盖的极端场景
- 计算效率提升:集成统一模型减少模块间冗余计算,提升整体效率
- 误差传导控制:避免传统流程中模块间误差的累积放大效应
4)端到端方法分类
- 算法类型:包含UniAD、VAD、UAD等代表性算法(后续章节详解)
- 输入输出特性:直接从原始传感器数据(摄像头/激光雷达/毫米波雷达)到控制信号
- 辅助任务设计:可能包含辅助学习任务确保模型输出符合预期
为者常成,行者常至
自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)


