
无人驾驶-10-完全端到端是怎么做到的
一、完全端到端的方法
-
传感器输入
数据来源:主要包括图像数据、各类雷达产生的点云数据以及地图数据
处理方法:- 图像数据:使用CNN网络提取图像特征
- 点云数据:采用点云任务特有的特征提取方式
- 处理视角:从点的角度和环境角度两种不同方式出发
-
端到端模型的输出部分
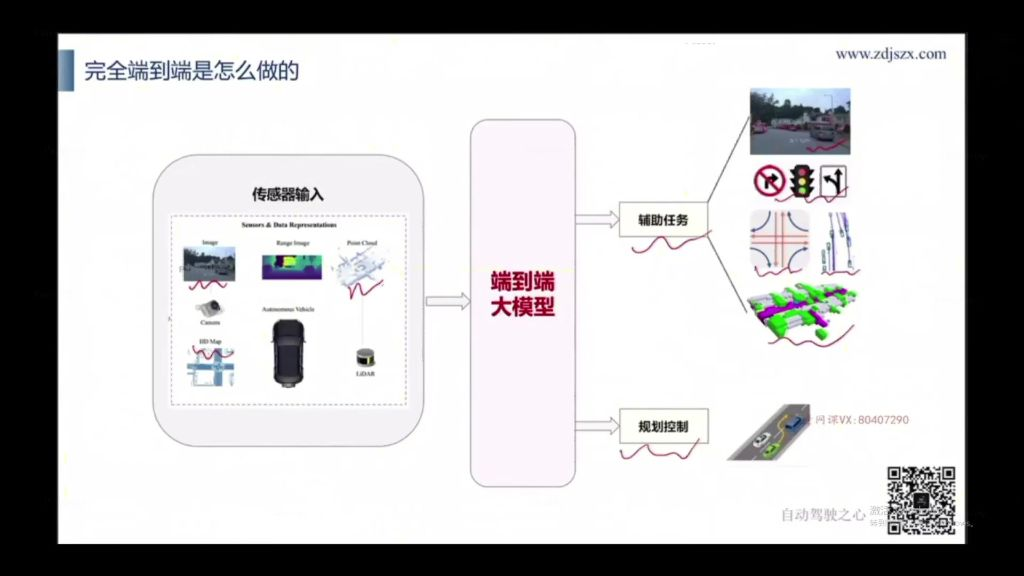
核心输出:
- 轨迹规划:预测车辆在未来若干时刻的运动轨迹
辅助任务:
- 安全功能:障碍物检测、红绿灯识别、车道线检测
- 预测功能:其他车辆未来运动预测、占据网格预测
- 设计原则:通过辅助任务提升规划控制的安全性和有效性
- 完全端到端方法的模型
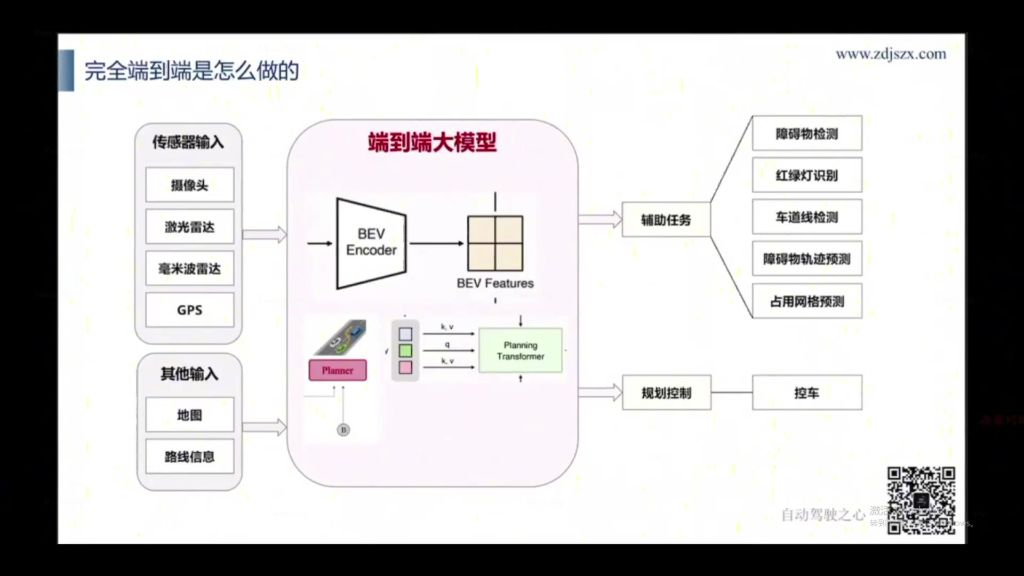
特征转换:
BEV特征:大部分方法会将图像或点云数据转换为BEV(Bird's Eye View)特征
特征交互:
直接传递:将BEV特征传递给所有模块
效率优化:采用其他模块特征传递给规划模块以提高实时性
设计考量:
辅助任务选择:需要思考哪些辅助任务更有效
特征传递方式:决定使用BEV特征还是辅助任务特征影响规划控制
- 完全端到端算法的评估指标
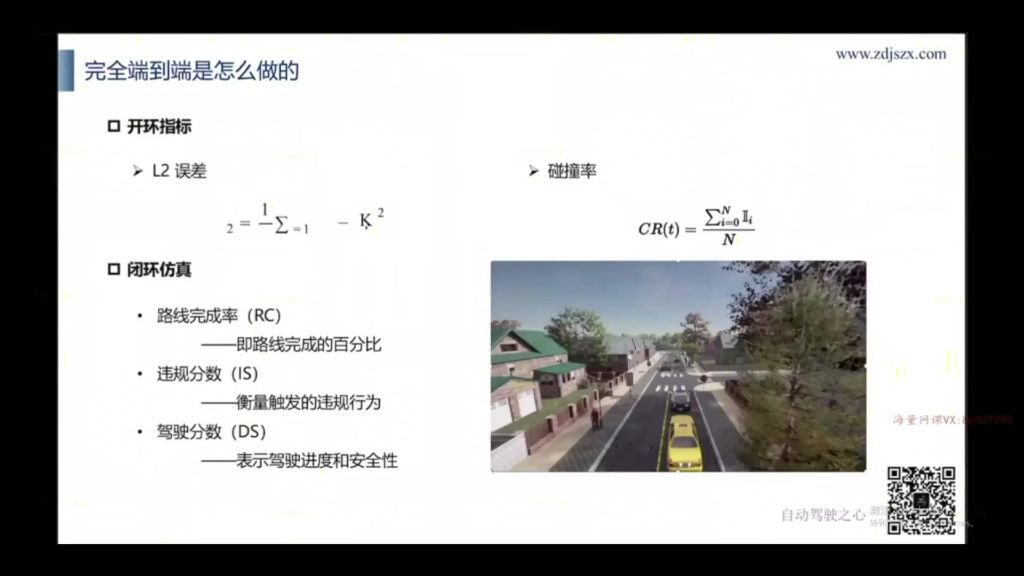
开环指标:
L2误差:计算预测轨迹与真实轨迹的损失,公式为
碰撞率:轨迹与障碍物发生碰撞的概率,公式为
局限性:无法反映实际控车情况,可能掩盖真实偏离问题
闭环仿真:
- 路线完成率(RC):完成路线占总路线的百分比
- 违规分数(IS):衡量行驶过程中触发的违规行为
- 驾驶分数(DS):综合路线完成率和违规分数评估驾驶进度和安全性
二、课程内容总结
核心要点:
- 传感器数据处理方法
- 辅助任务设计原则
- 模型特征交互方式
- 评估指标的选择与解读
学习重点:
- 理解不同数据类型的特征提取方式
- 掌握辅助任务对规划控制的影响机制
- 能够正确解读和比较不同方法的评估结果
为者常成,行者常至
自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)



